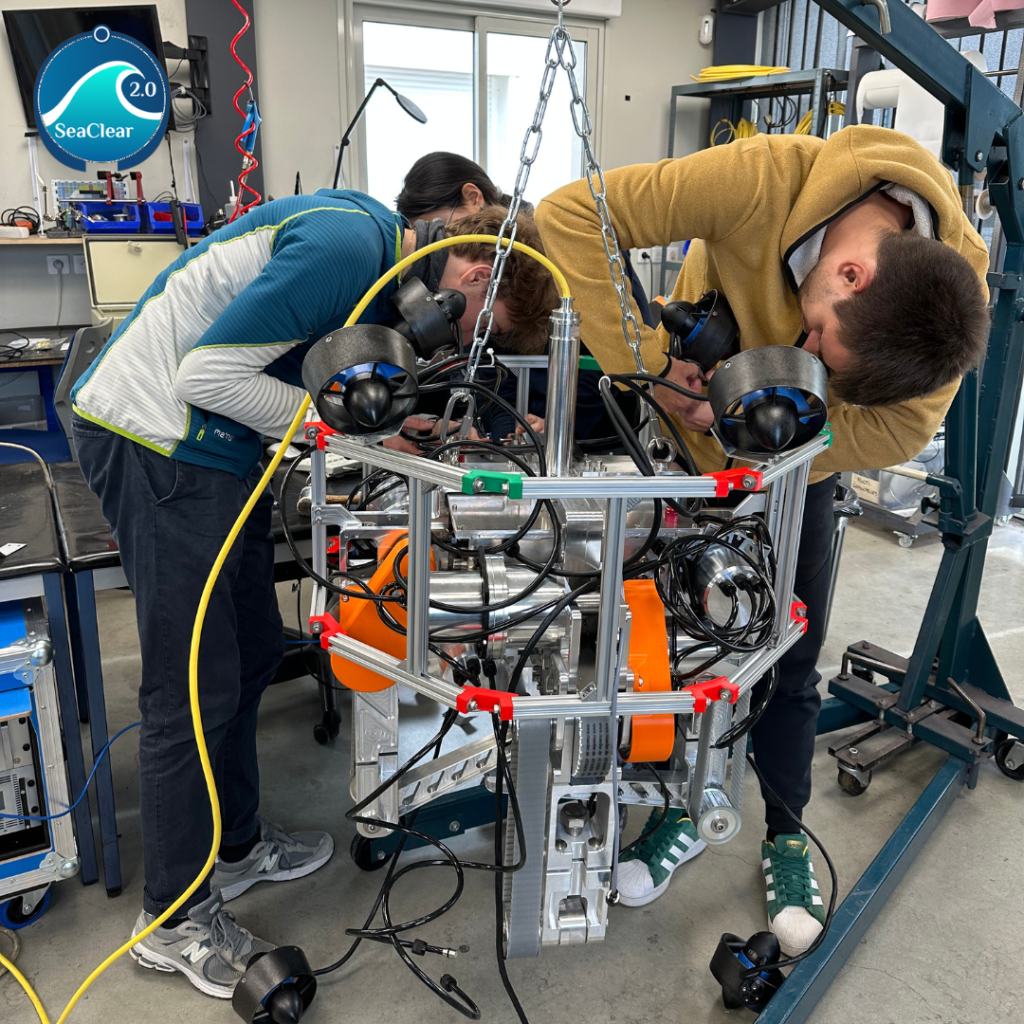
System integrations and trials were in full swing in early December in Marseille.
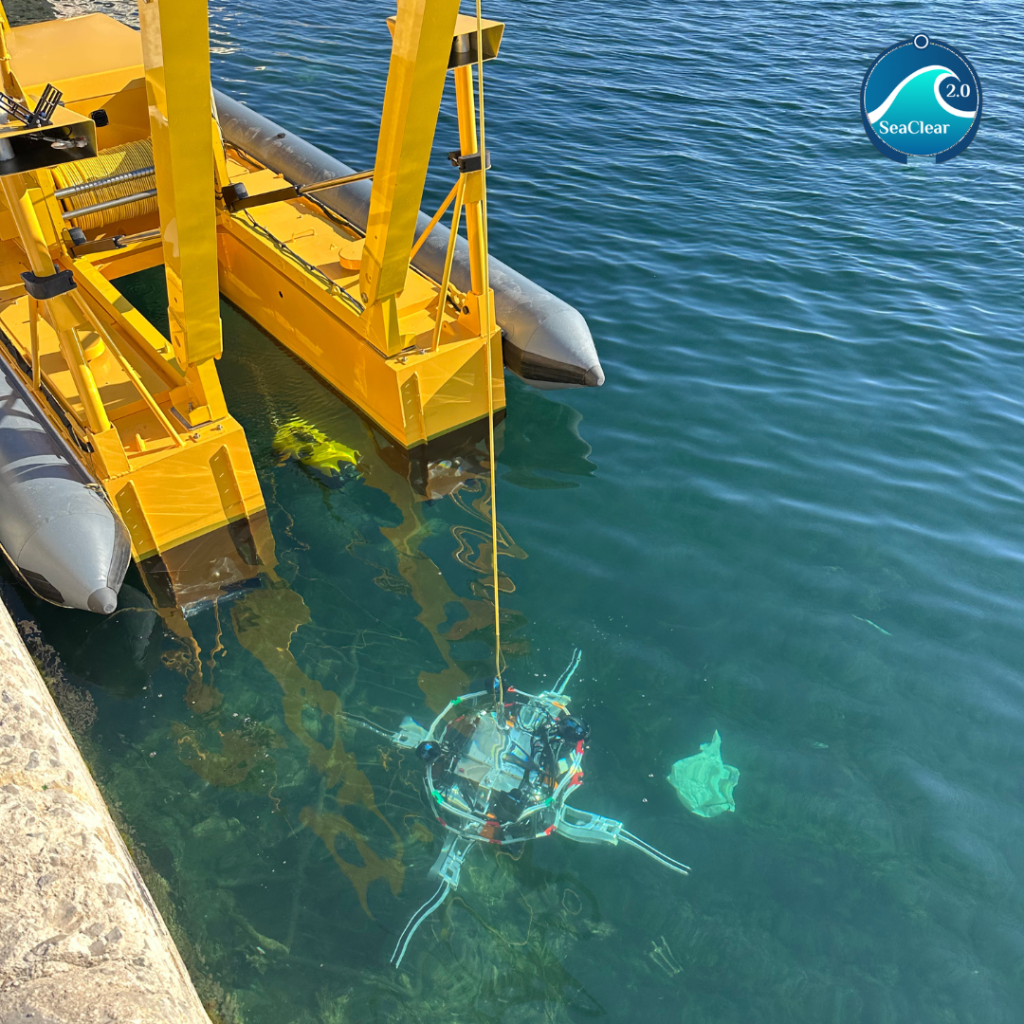
Collaborative efforts by University of Dubrovnik,(UNIDU), Subsea Tech and Technical University of Munich ‘s teams confirmed system parts are working smoothly together and even resulted in the successful recovery of a tire from the seabed.
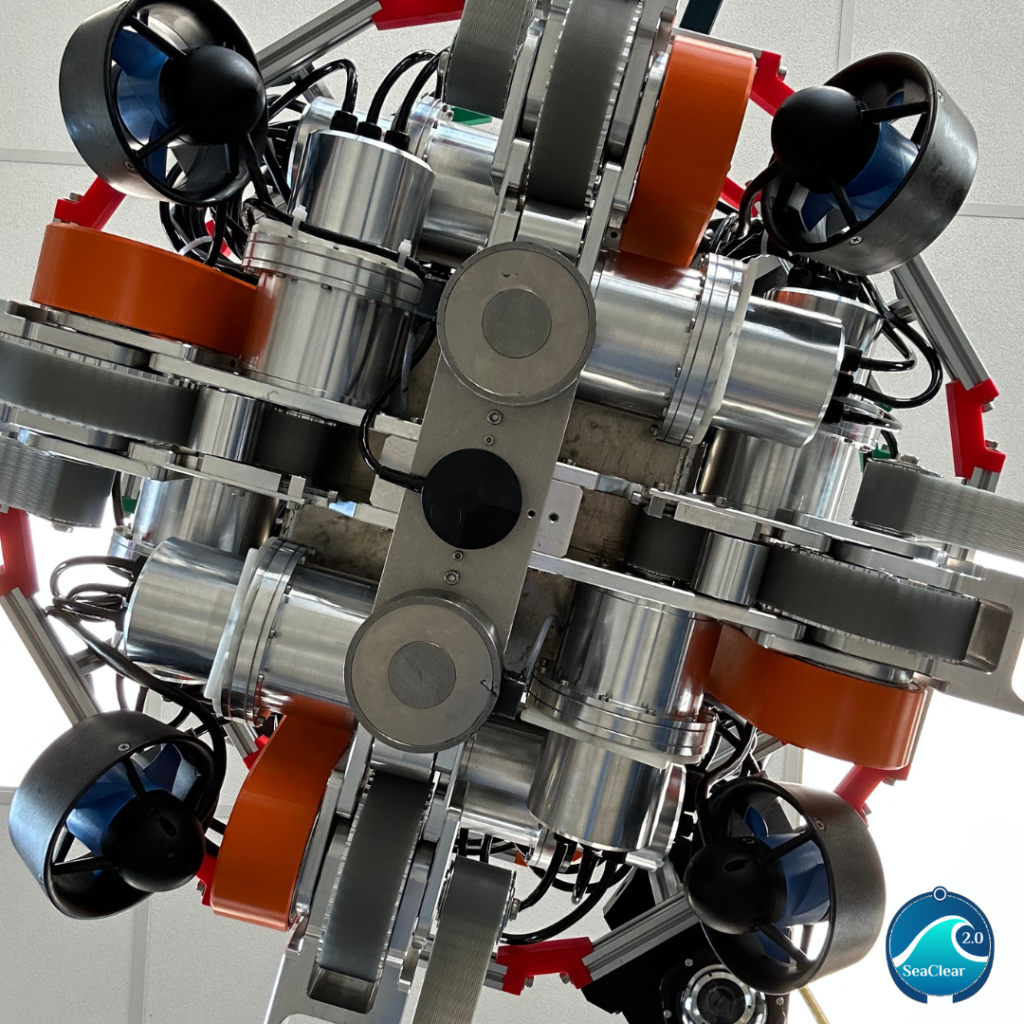
During the trials the system’s drone, Mini TORTUGA, SeaCAT2 and grapple, where tested in teleoperation mode, while, the system’s drone, landing platform, SeaCAT2, LARS, and grapple were tested and integrated to ensure good communication between the system parts in the SeaClear2.0 collaborative multi-robot framework.
The system integrations marked a promising start to our upcoming pilots and demonstrations, and served as a sneak-peak into the challenges of marine robotics for our young early-stage researchers.